详解变频调速的基本原理(步进电动机工作原理及特点)

周辰生优秀作者
原创内容 来源:小居数码网 时间:2024-02-18 10:30:01 阅读() 收藏:29 分享:46 爆
导读:您正在阅读的是关于【数码知识】的问题,本文由科普作家协会,生活小能手,著名生活达人等整理监督编写。本文有1603个文字,大小约为7KB,预计阅读时间5分钟。
步进电机(stepper motor)是一种是将电脉电流信号转变为角位移或线位移的控制元件。简单的说,你给步进电机一个脉冲电流信号,它就会转动一个角度,所以具有定位精度高的特点。
步进电动机工作原理及特点
普通的直流或交流电机只要施加合适的电压就能够使其转动,断电即可使其停止转动,控制起来虽然很方便,但有些时候,我们需要很精确地控制转动的角度,以便实现一些高精度的定位操作。例如DVD播放器或硬盘控制读盘时,打印机控制打字位置时,监控器控制转向时,数控机床进行定位时,机器人控制动作时等等,普通的电机很难满足这种需求,而步机电机就可以。从名称也可以看出,步进电机就是“按步前进”的电机,一次只会旋转一个固定的角度,每旋转一次可称为1拍,而每拍旋转的角度可称为步距角。
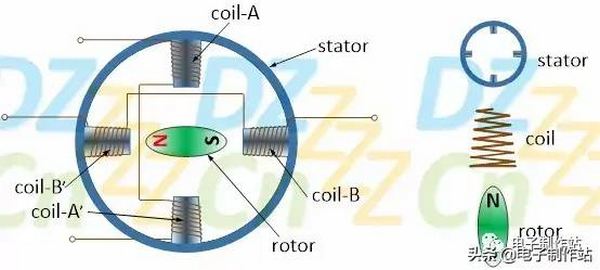
为了进一步理解步进电机的硬件驱动电路设计,我们先来了解一下它的基本结构。最简单的步进电机如下图所示
可以看到,步进电机与所有电机一样分为定子(stator)与转子(rotor),在定子周围均匀分布的齿槽上缠绕的那些线圈(coil),我们可以称为绕组或相,这些绕组按对进行排列,其中绕组A与A’形成一对,绕组B与B’形成一对。而转子则是一块能够绕中心任意旋转的永磁铁,它有N与S两极。由于定子上存在两个绕组,而转子上存在两个磁极,所以我们也可以称其为双相双极电机。绕组注入一定电流时就会产生一定的磁场,它也有N与S两极,从不同绕组注入电流就可以改变磁场的极性,从而能够对永磁铁转子产生不同方向的吸力,这是转子旋转的基本原理。
下面我们具体来看看转子是怎么旋转的。假设电流从绕组A注入再从绕组A’流出,则两个绕组都会产生一定的磁场。根据右手定则,线圈A与线圈A’产生的磁场方向均为上N下S,再根据“同名相斥、异名相吸”的基本原理,永磁铁的N极会被绕组A产生的磁场S极吸过来,与此同时,永磁铁的S极会被绕组A’产生的磁场N极吸过来,它们的吸力是同时产生的,也就引起转子顺时针旋转90o,如下图所示(以转子中红色N极为参考基准)
至此,我们对电机绕组完成一个周期的电激励,电机转子也旋转了一整圈。用来激励的脉冲越多,电机转动的角度就越大,脉冲的频率越高,电机的转速也就越快,但不能超过最高频率,否则电机的力矩迅速减小,电机将不会旋转。
我们可以使用时序图来表示前述整个驱动过程,如下图所示。
图中的驱动(Driver)模块用来提升驱动能力,因为一般处理器的IO引脚的电流不足以直接驱动电机旋转,后续会再详细讨论。
我们把按上述顺序驱动电机旋转的励磁方式称为全步模式(full-stepping),在英文数据手册中可能会标记为“1-1phase”。此种激励方式中每次电流只对一个绕组进行激励,它的好处就是消耗的电流比较低。
当然,想让步进电机旋转的励磁方式还有很多,例如我们也可以每次同时对两个绕组进行激励,激励顺序依次为A与B、B与A’、A’与B’、B’与A、A与B……具体情况如下图所示。
这种励磁方式也是全步驱动,英文数据手册中可能会标记为“2-2phase”。由于两个绕组同时通电,所以相对之前的励磁方式可以获得更好的扭矩和速度,只是要多消耗一些电流。使用时序图可表示如下
另外一种比较复杂的微步驱动方式(microstepping),它的时序波形如下图所示:
可以看到,两个绕组被两个相隔90o的正弦波激励(总体波形与“2-2-phase”相同,只不过激励电流不是矩形波),只要控制流过绕组的方向和幅度,就可以增加电机在一次完整旋转时所需要的步数,这种方式具有良好的扭矩和平衡的操作,大家现在了解一下即可,后续再详细讨论。
当然,我们目前讨论的电机可以说最简单的,再来看一个双相六极电机,如下图所示。
与双相双极电机唯一不同的是,转子包含了3个永磁铁,拥有6个磁极,我们同样看一下它的驱动方式,如下图所示(以转子上的红色N极为参考基准):
当然,步进电机根据力矩产生的原理可以分为三种类型,其一为永磁步进电机(PermanentMagnet,PM),也称为永磁或激磁式步进电机,它的永磁转子会根据施加的脉冲被排斥或吸引到定子,我们前面讨论的就是这种,它具有动态性能好,输出力矩大的特点;
其二为可变磁阻步进电机(Variable Reluctant, VR),也称为反应式步进电机,它的转子由软磁材料组成,被定子磁极吸引后通过定子和转子之间的最小磁阻提供运动,它的结构简单,成本低,但是动态性能差、效率低、发热量也大。
其三为混合同步步进电机(Hybrid synchronous, HB):它是可变磁阻和永磁步进电机的组合。
我们来看看三相可变磁阻步进电机的基本结构,如下图所示:
可以看到,可变磁阻步进电机与永磁步进电机的结构差不多,主要区别在于转子不再是永磁铁,而是由软磁材料(如硅钢片)制造的,转子周围均匀分布了一些齿子,这里特别需要注意:转子齿与定子齿之间的对应关系,当转子的一对齿子与一对定子齿对齐时,转子的另一对齿子恰好指向定子齿的间隙处,也就是我们所说的错齿,它是步进电机旋转的原因。
我们具体来看看它的驱动原理,如下图所示。
至此,转子旋转了90o。然后紧接着再依次从绕组A’、B’、C’、A、B、C….注入电流即可使转子持续旋转,我们把依次激励绕组A、B、C、A’、B’、C’、A、B、C…的方式称为三相单三拍驱动方式。与永磁式步进电机相似,也可以每次同时将电流注入两个绕组,即绕组激励次序为AB、BC、CA’、A’B’、B’C’、C’A、AB…..,这种励磁方式称为三相双三拍驱动方式。还可以混合三相单三拍与三相双三拍方式进行驱动(步距角为15o),也称为三相六拍驱动方式,我们就不再赘述了,你懂的。
再来看一下四相步进电机的结构,如下图所示:
很明显,转子的齿数越多,步距角就越小,相应的定子上也会细分更多均匀分布的小齿。转子齿数为40的三相步进电机如下图所示
相应的定子与转子展开图如下所示:
上面就是小居数码小编今天给大家介绍的关于(步进电动机工作原理及特点)的全部内容,希望可以帮助到你,想了解更多关于数码知识的问题,欢迎关注我们,并收藏,转发,分享。
94%的朋友还想知道的:
- 单片机控制步进电机的工作原理(单片机控制步进电机程序详解)
- 品牌电动机推荐(哪几个电动机品牌好)
- 单片机控制步进电机程序(51单片机最小系统原理图教程)
- 步进电机的简单控制方法(三相步进电机驱动器接线图)
(464)个朋友认为回复得到帮助。
部分文章信息来源于以及网友投稿,转载请说明出处。
本文标题:详解变频调速的基本原理(步进电动机工作原理及特点):http://sjzlt.cn/shuma/118915.html
精选文章
-

-

-

-

-

-
-

-
天龙功放声音模式设置(天龙功放音量调
1464 -

懂行的人建议买华为还是荣耀手机(华为
1269 -